
近期,天津大学化工学院张雷教授课题组、机械学院陈焱教授课题组通过交叉学科的合作,利用琼脂糖薄膜的湿度敏感特性,研究出了一种可以在恒定湿度环境下快速滚动的软体机器人——Hydrollbot,直线运动速度达到0.714 BL/s,将恒定湿度驱动的机器人速度提高了两个数量级,高于已报道的变湿度响应机器人,同时能够负载自身重量的100%,并且实现了运动轨迹的编程设计,相关研究成果以“A Humidity-powered Soft Robot with Fast Rolling Locomotion”为题在线发表在Research上 。
Citation: Lei Fu, Weiqiang Zhao, Jiayao Ma, Mingyuan Yang, Xinmeng Liu, Lei Zhang, Yan Chen, "A Humidity-Powered Soft Robot with Fast Rolling Locomotion", Research, vol. 2022, Article ID 9832901, 10 pages, 2022. https://doi.org/10.34133/2022/9832901
由环境驱动的软体机器人能够对环境中的光、热、化学物质、磁场、湿度等刺激做出反应,实现特定运动与功能,是机器人领域的研究热点之一。目前此类软体机器人设计中一个重要挑战是在如何在高度集成机器人本体结构、执行器和能源的同时,在无人为干预的恒定外界环境中实现快速运动以及可编程的运动轨迹。针对这一问题,本项工作基于湿度敏感的琼脂糖薄膜材料,通过机器人结构设计克服了薄膜各向同性和随机弯曲的问题,研究出了一种可以在恒定湿度条件下连续快速运动的软体机器人Hydrollbot,并实现了运动轨迹的可编程设计。
作者首先对机器人的结构进行设计(图1)。通过在薄膜两侧粘贴PET条带克服了薄膜的随机弯曲问题,实现了单向弯曲,并通过薄膜两端的V形PET脚增加了机器人与基底表面的摩擦力,同时避免了机器人反向运动。
机器人与湿度环境接触后,在吸水产生的弯曲变形以及其自身的重力共同作用下,实现了在恒定湿度环境下连续的快速滚动(图2)。
图2 速度为0.714 BL/s 的Hydrollbot的运动过程
进一步,作者建立了机器人运动的理论分析模型(图3),发现了机器人运动速度随着薄膜长度和湿度的增加而增加,而随着薄膜厚度和胶带长度的增加而降低。
基于理论模型优化后的机器人的重量仅为6.8 mg,而直线滚动速度达到0.714 BL/s,超过目前报道的所有湿度响应软体机器人(图4),并领先于目前大多数环境驱动的软体机器人。此外,Hydrollbot还能够携带自身重量100%的有效载荷运动(图5)。
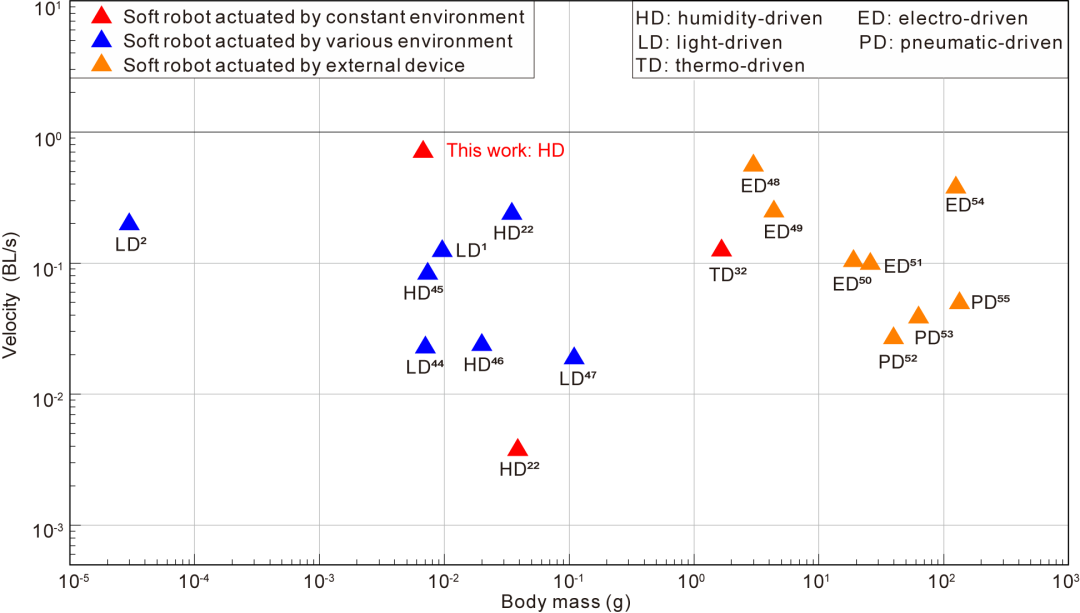
图5 Hydrollbot100%自重负载下的运动过程
最后,作者通过改变Hydrollbot机器人结构的几何形状和脚的位置调控机器人的滚动方向,通过调整PET条带的相对位置控制薄膜的弯曲方向,实现了运动轨迹的多种简单编程(图6)。
图6 四种具有不同运动轨迹的Hydrollbots
此项工作为环境驱动软体机器人的结构设计提供了多学科交叉研究的新思路,有望推动湿度驱动软体机器人在医疗、传感、驱动等方面的应用。未来的研究将通过创新结构设计与多种刺激敏感的新材料相结合,实现机器人在复杂环境下的适应性、智能性与可靠性。