成果简介:
缆控水下观测机器人(ROV)是一型可以水面遥控水下运动,水下录像水面呈现的潜水器,水下机器人自身携带高强度水下光源以及高清晰广角度摄像机。中性浮力、低水阻力、超强拉力、多芯集成的超细柔性脐带缆来实现水面监控单元与水下机器人之间的数据、电源和视频信号的传输。
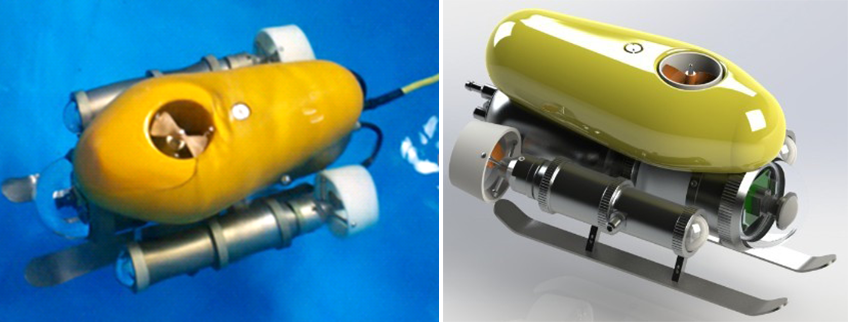
技术特点:该微型缆控水下观测机器人采用磁耦合传动技术、直流载波技术、超细中性浮力凯夫拉缆技术、自动航向保持和定深技术、高效水动力外形设计技术,平台具有极大的技术先进性。其操作简便简单,便携小巧。技术指标:
1、高分辨率彩色摄像头,数字变焦与云台控制;
2、3个磁耦合推进器,方向和速度可调;
3、高亮度LED灯组;
4、超细柔性脐带缆;
5、配置深度计和高度计,可实现自动定深操作;
6、配置电子罗盘,自动航向保持;
7、视频与字符叠加,实时状态显示,屏幕菜单操作;
8、数字信号传输,减小信号失真;
9、简易游戏操纵手柄控制;
10、富有美学设计理念的流线型机器造型,静电喷漆外观,硬质氧化水下机身。